설계의 기초, 고체 역학
오늘은 기계공학과에서 배우는 4대 역학 (고체역학, 열역학, 유체역학, 동역학)중 하나인
고체역학에 대해 간단히 얘기해볼까 합니다. 지식을 전달하기 보다는 어떠한 과목인지 대략적으로 알수 있도록 간단하게 설명해드리려고 해요.
(아라미르 드론 포스팅도 조금 미뤄졌는데 조만간 포스팅 하겠습니다.)
우선 연세대학교 기계공학과에서는 2학년 때부터 전공 공부를 시작하게 됩니다.
그럼 1학년 때는 무얼 하냐구요?
1학년 때는 수학, 물리, 화학 (또는 생물), 영어, 글쓰기 등 기초 과목을 들으며 소양을 쌓게 됩니다.
1학년 때 듣는 대부분의 과목의 경우 고등학교 범위와 겹치기 때문에 고등학교 때 열심히 공부했던 학생은
조금 수월하게 학교를 다닐 수 있게 됩니다. 학업 이외의 동아리 같은 다양한 활동을 경험할 수 있는 기회가 되지요.
반면 수업이 조금 지루하게 느껴질 수도 있고 많은 남학생들이 1학년을 마치고 군대를 가기 때문에 전공을 제대로 접하지 못하고 군대에 가게 되는 단점도 있습니다. 여담이지만 군대에 가게 되면 진로에 대한 고민을 참 많이 합니다.
저 또한 그랬는데, 당시 전공을 제대로 접해보지 못했기에 기계공학이 제 적성에 맞는지 판단이 잘 서지 않더라구요.
기계공학 개론으로 인해 후배들이 저희와 같은 문제를 겪지 않으면 좋겠습니다. 잡설이 길었습니다.
고체 역학은 이름에서도 알 수 있듯이 고체에 응력이 작용했을 때 발생하는 변형에 대해 공부하는 과목입니다.
Stress(응력)는 단위 면적당 작용하는 힘인데요. 해당 면적에 수직 방향으로 작용하는 normal stress(수직 응력)와 수평 방향으로 작용하는 shear stress(전단 응력)가 있습니다. 이러한 응력이 물체에 작용하게 되면 물체에 변형 (체적 및 모양의 변화)이 발생하게 됩니다.
고체에 작용하는 응력과 변형률의 관계를 그래프로 나타내면 많은 경우 다음과 같이 나타납니다. (모든 고체가 이러한 관계를 보이지는 않아요!) 기계공학과에서 가장 많이 보는 그래프 중 하나인데요.
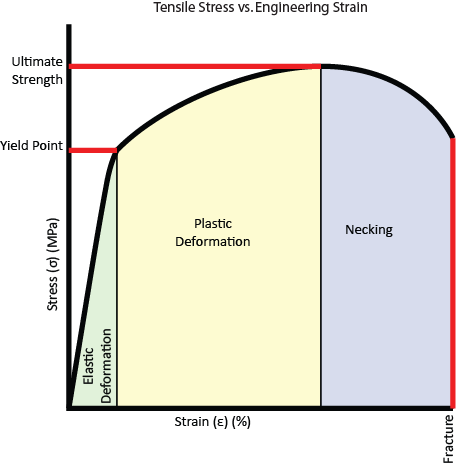
위 그래프의 빨간색으로 표시된 부분을 유심히 보시길 바랍니다.
1) Yield Point (Strength) 이전의 영역은 탄성 구간입니다. 고체가 장력으로 인해 늘어나더라도 장력이 제거되는 순간 본래의 형태로 되돌아옵니다. 이 point (strength)를 지나는 순간 외부에서 작용하는 힘이 없어지더라도 고체는 본래의 모습을 찾지 못합니다. 너무 많이 잡아당긴 고무줄을 연상하시면 쉽게 이해되실 거 같습니다.
2) Ultimate Strength는 재료가 절단되기 전 견디는 최대 응력입니다. 이 구간이 지나면 재료는 엿가락이 늘어지듯이 직경이 줄어들면서 결국 마지막 단계인 3) Fracture, 파괴 단계에 도달합니다.
이러한 재료의 성질에 대해 이해하는 것은 상당히 중요합니다. 특히, 안전한 설계를 하기 위해서는 물질에 작용하는 응력을 특정 구간 이상 넘어가지 않도록 제한하는데요. 이를 반영한 것이 안전 계수 (factor of safety)입니다. 안전계수는 다음과 같이 정의됩니다.

안전 계수가 1을 넘지 못하면 실제 작용하는 응력이 물질이 견딜 수 있는 최대 응력보다 크기 때문에 잘못된 설계가 되겠죠? 반면 안전 계수가 클수록 안전하지만 너무 큰 안전 계수에 맞춰 설계를 하면 '오버디자인'이 되버려 비효율적인 설계가 되버리고 맙니다.
응력은 여러 형태로 고체에 작용할 수 있는데요.
1) Bending
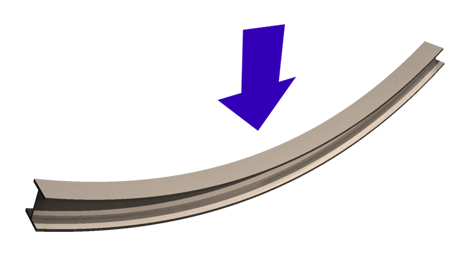

2) Transverse Shear
3) Torsion

4) Axial Loading

고체 역학에서는 위의 예시를 비롯하여 여러 상황에서 다르게 작용하는 응력과 이에 따른 재료의 거동에 대해 공부합니다. 재료의 어떠한 부분에 가장 큰 응력이 작용하는지 또 그 응력이 크기는 얼마인지 등을 공부하는 것이지요. 이를 기반으로 하여 주어진 조건 및 환경에서 안전하고 효율적이 설계를 하기 위해서 말이죠.
이상 아주 간략한 고체 역학 얘기를 마치겠습니다. 다음에는 열역학에 대해 얘기해 보겠습니다.
'Mechanical Engineering' 카테고리의 다른 글
| 학부생이 설명해주는 기계공학 개론 - 기계공학의 이미지 (0) | 2015.08.20 |
|---|---|
| 기계공학과 개론을 시작하면서 (0) | 2015.08.19 |












