[아두이노 드론] 변속기 교체 후 PID 제어 영상
안녕하세요 와이엔지니어스입니다. 지금부터 올라가는 글들은 모두 과거 네이버 블로그에서 퍼온 글들입니다.
안녕하세요! 와이엔지니어스입니다.
드디어 네이버 블로그에서 처음으로 드론 관련 포스팅을 하네요.
기존의 포스팅은 모두 저희가 운영하던 티스토리 블로그에서 퍼온 글입니다. 조금씩 수정하면서 동영상 자료도 다시 제대로 넣고 할 예정이지만, 시간이 좀 걸릴테니 급하신 분들은
http://yngneers.tistory.com 으로 가셔서 참고해주시면 감사하겠습니다.
오늘 저희가 다룰 내용은 새로 구입한 변속기에 맞춰 PID 튜닝을 하는 과정입니다.
원래 skywalker 하비윙 4in1 변속기를 사용했는데 그 중 한 모터 부분이 나가버린 것 같았습니다.
변속기 수리를 해볼 생각도 했지만... 거기에 시간을 다시 투자하기가 조금 껄끄러워서 새롭게 구입했구요.
새로 구입한 녀석은 바로 이녀석입니다.
https://www.ravenfury.com/shop/escs/hobbywing-new-xrotor-20a-esc-wire/

20A짜리구요. 저희가 사용하는 모터가 18A 수준에서 동작한다고 해서 20A로 하는 게 조금 불안한가 싶기도 했는데... 가장 저렴한 놈을 고른다며 찾은거라 이걸로 그냥 결정!

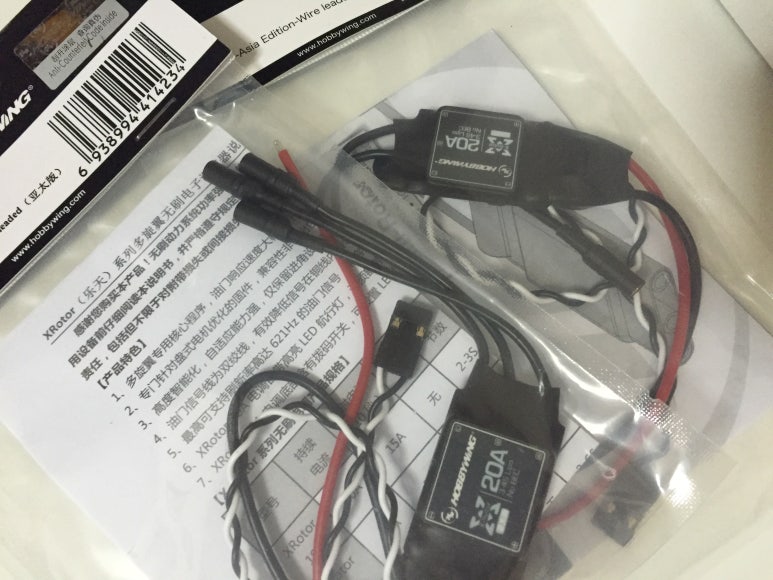
이렇게 배송이 왔습니다. 기존에 똑같은 거 2개가 따로 있어서 2개만 구입을 했고요.
4in1 변속기와는 다르게 전원 분배부터 BEC 장착까지 모두 직접 제작해야 했습니다.
일단 BEC는 필요가 없었어요. 어차피 아두이노 전원은 컴퓨터로 계속 주고 있었으니깐요. 그래서 납땜질만 열라 해서 만들어낸 결과물을 첨부합니다.
이건 팀원 중 한명이 따로 진행하고 있는 프로젝트에서 따온 사진들입니다.



보시다시피.
예전에도 설명한 포스팅이 있는데, 변속기는 전원선, 아두이노 신호선과 접지선, 그리고 모터선 3개로 이루어져 있습니다.
배터리 연결부를 2군데로 나누어 병렬연결하고 각각 선 꼬은 뒤에 납땜질!!! 해서 연결합니다. 대충 연결하면 살짝 힘줬을 때 툭 빠져버리는 경우가 생기므로 잘 해주도록 합니다.



배터리 접합부는 제가 따로 임시로 만들었습니다. 보시다시피 동그란 구멍 2개가 있는데, 저희 배터리 커넥터 부분이 저런 형상에 딱 맞게 생겼거든요.
아무튼, 변속기가 달라지는 만큼 4in1 기존 변속기를 아예 제거하고 이녀석들 4개로 대체해야했습니다. 지금은 pid게인 튜닝 때문에 임시로 이렇게 했지만 나중에는 4개를 다 병렬연결해줘야겠죠?
pid 튜닝하는 과정은 지금과 똑같았습니다.
다만, 변속기가 달라지다보니 확실히 반응에 차이가 난다는 걸 느꼈습니다.
그래서 기존 pid 게인값과 좀 다른 값들로 대충 잡아봤는데요.
보시다시피 각도를 바꿀 때나 외란이 주었을 때 반응속도가 매우 빠른 것을 볼 수 있는데요.
내부 P가 너무 커서 외부 P가 결정하는 목표 각속도 값에 너무 이르게 도달하는 것 같았습니다. 그래서 움직이면서도 좌우로 진동하는 걸 볼 수 있었는데요.
대체로 보아하니, 외부 P에 비해 내부 P가 작으면 조금씩 조금씩 제자리 진동하고, 반대로 내부 P가 너무 크게되면 제자리 진동은 딱히 없는데 저렇게 외란을 주거나 했을 때 진동이 심한 것을 알 수 있었습니다.
아래는 P, PID게인을 다 잡아본건데요. 아직 완벽하진 않고 대충 해본거라..
훨씬까진 아니고 지금은 이거보다 좀 더 잘되는 것 같은데요. 보시다시피 위 영상보다 반응 속도가 다소 늦은 대신, 그만큼 진동도 덜한 걸 볼 수 있습니다.
이전 변속기에서는 외란을 줬을 때 overshoot과 steady state error 등이 잡히는 데 시간이 좀 걸렸는데 이번에 사용하는 변속기는 그런 문제가 많이 줄어든거같네요.
왜이렇게 차이가 나는지는 잘 모르겠습니다만, 아무튼 이 변속기로 사용하기로 하였으니 이녀석에 맞춰 계속 진행해볼 생각입니다.
셤 끝나고 다음에는 4개의 모터 다 제어하는 모습을 볼 수 있기를 바라며... 오늘은 끝!!
[출처] [아두이노 드론] 변속기 교체 후 PID 제어 영상|작성자 와이엔지니어스
'아두이노 드론 프로젝트' 카테고리의 다른 글
| [아두이노 드론] I2C (Inter Integrated Circuit) 통신 1부 (0) | 2017.02.12 |
|---|---|
| [아두이노 드론] 변속기 연결작업 및 배선 정리 (0) | 2017.01.21 |
| [아두이노 쿼드콥터] 부품 고장 (1) | 2015.12.07 |
| [아두이노 쿼드콥터] pid 제어 테스트 영상 (0) | 2015.12.04 |
| [아두이노 쿼드콥터] 앱인벤터로 만드는 안드로이드 블루투스 통신앱 (5) | 2015.11.25 |